MIT, 파리지옥풀 같은 소프트로봇 자신의 100배까지 들어올려
제조공장서 물건 포장·들어올리기 등 다양한 용도에 적용 기대
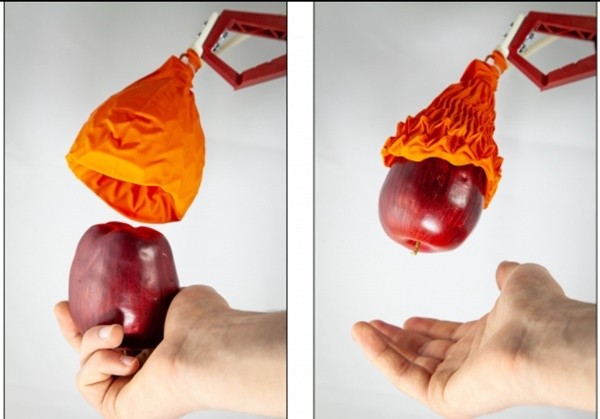
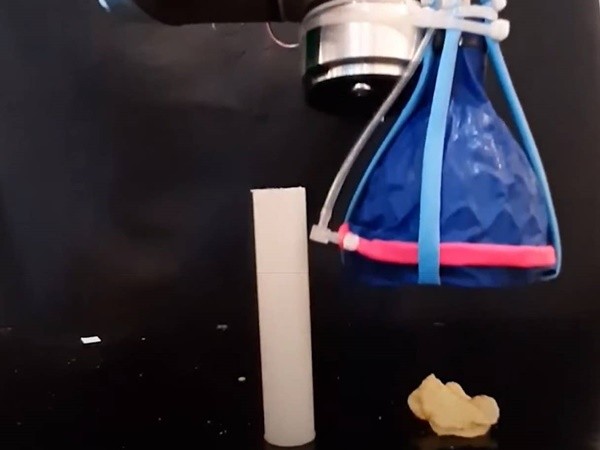
부스러지기 쉬운 갑자칩 같은 물체를 집을 때 직접 시각센서로 살펴보고, 촉각센서로 인지해 조심스레(부서뜨리지 않고) 집어드는 로봇손이 등장했다. 파리지옥 꽃처럼 생긴 부드러운 소재의 로봇 집게손은 자기 무게의 100배나 되는 물체도 거뜬히 집어 올린다.
인디펜던트는 2일(현지시간) 미 매사추세츠공대(MIT) 연구진이 개발한 사람처럼 시각과 촉각을 사용해 물체를 집어드는 2종의 로봇 집게손(그리퍼)을 소개했다.
MIT의 컴퓨터 과학 및 인공지능 연구소(CSAIL)가 만든 새로운 2종의 로봇손은 딱딱한 소재로 만들어진 기존 로봇보다 훨씬더 부드럽고 유연한 소재를 사용한 로봇으로 차세대 소프트 로봇 분야의 획기적 발전을 과시한다. 연구진은 “우리는 세상을 느낌으로써 보길 원한다”고 말했다.
이런 종류의 소프트 로봇들은 종종 유기 생명체로부터 영감을 얻으며 다재다능한 기능으로 많은 이점을 제공한다. 지금까지 이 로봇들은 경직된 소재로 된 로봇보다 훨씬 섬세하게 작동했지만 자신들이 어떤 아이템과 상호작용 하는지 인지하는 능력은 부족했다. 이 문제를 극복하기 위해 연구진은 로봇에 다양한 센서, 카메라, 소프트웨어(SW)를 탑재해 다양한 물체를 ‘보고 분류’할 수 있도록 했다.
다니엘라 러스 MIT 교수 겸 CSAIL 소장은 “우리는 세상을 느끼면서 볼 수 있기를 바란다”고 말했다. 그는 “이 부드러운 로봇 손은 감자칩과 같은 섬세한 물체부터 우유병 같은 무거운 물체에 이르는 다양한 물체를 집어들 수 있다”고 설명했다.
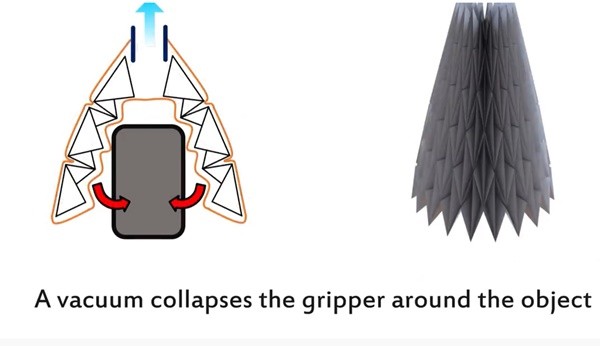
첫 번째 로봇은 지난해 MIT와 하버드대 팀이 만든 원뿔 모양의 로봇 집게 손(그리퍼)이다. 이는 물체에 다가가 곤충을 잡아먹는 파리지옥 풀처럼 물체위로 무너지는 듯한 방식으로 자신 무게의 100배나 되는 이상한 형태의 물체까지 집어올릴 수 있었다. 종이접기(오리가미)에서 착안해 만들었고 ‘오리가미 로봇 그리퍼(Origami Robot Gripper)’로 명명했다.
여기에 사용된 촉각 센서는 로봇이 무엇을 집는지 이해하고 그에 상응해 작용하는 압력의 양을 조절하게 해 주었다. 이 센서는 실험에 사용된 10개의 물체를 90% 이상의 정확도로 식별할 수 있었다.
추가된 촉각 센서는 로봇이 무엇을 집는지 이해하고 그에 상응해 작용하는 압력의 양을 조절하게 해 주었다. 이 센서는 실험에 사용된 10개의 물체를 90% 이상의 정확도로 식별할 수 있었다. MIT가 소개한 동영상(아래)을 보면 사과, 물병, 럭비공, 드론 등에 이르기까지 잡지 못하는 물체가 없다.
MIT의 조시 휴즈 논문 수석 저자는 “우리가 사용한 센서는 빠르게 제작되고, 그리퍼에 장착되며, 민감성과 신뢰성을 보여주면서 기존의 다른 많은 소프트 촉각 센서와 차별화된다”고 말했다. 그는 “우리는 이 로봇들이 제조 환경에 필요한 물건포장, 물건 들어올리기 같은 다양한 용도에 적용될 수 있는 새로운 소프트 센싱 방식을 제공하길 바란다”고 말했다.
두 번째 로봇은 혁신적인 ‘겔플렉스(GelFlex)’ 손가락을 사용한다. 이 손가락은 힘줄로 움직이는 메커니즘과 일련의 센서가 들어가 ‘더 미묘한, 인간과 같은 감각’을 제공한다.
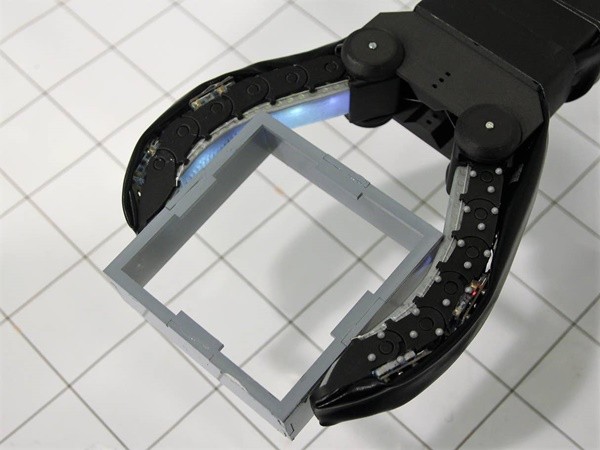
이 팀은 이제 센서의 감지 알고리즘을 미세하게 조정하고 비틀기 같은 좀더 복잡한 손가락 동작을 구현하고 싶어한다.
두 로봇 모두 두편의 논문에서 상세히 기술돼 있다. 이 논문들은 ‘2020년 로봇 및 자동화에 국제 컨퍼런스(2020 International Conference on Robotics and Automation)’에서 가상으로 발표될 예정이다. 이 행사는 5월 31일부터 8월31일까지 가상공간에서 열린다.
무단전재 및 재배포 금지
기사제보 및 보도자료 news@aitimes.com