[편집자주][김미정의 로빌리티 뿌뿌]에서 '로빌리티(Robility)'는 로봇(Robot)과 모빌리티(Mobility)를 합친 용어입니다. 디지털전환 시대 핵심 키워드인 로봇과 모빌리티 기술을 현장에서 체험해 쉽고 재밌게 소개하겠습니다.
자율주행차량은 정글 같은 도로 위에서 사람 대신 기계가 운전하는 시스템이죠. 그만큼 예기치 않은 상황에 대처를 잘 해야 해요. 사고를 미연에 방지하기 위해선 어떻게 해야 할까요? 충분히 안전성이 검증된 자율주행 소프트웨어(SW)를 탑재해 다양한 교통 상황에 능숙하게 대처해야죠.
자율주행에 탑재되는 라이다(LiDAR), 레이더 같은 하드웨어의 품질이 아무리 뛰어나도, 자동차 안에 있는 SW가 실도로에서 벌어지는 다양한 상황에 대처를 못하면 무용지물입니다.
실제로 사용해보지도 않은 자율주행 SW 안전성을 어떻게 검증할까요? 가상 환경 속에서 테스트해볼 수 있습니다. 다양한 시뮬레이션을 통해 SW를 검증해 보는 방식이죠. 이를 통해 안전성이 검증되면 실제 상황에서도 유용하게 쓰이겠죠? 반면, 잘 만들어진 줄 알았지만 시뮬레이션을 통해 알아보니 교통 상황에 제대로 대처하지 않은 것으로 판단되면 이를 보완하면 됩니다.
이번 [김미정의 로빌리티 뿌뿌]에서는 자율주행 시뮬레이션 플랫폼을 개발한 전문가를 초대했어요. 바로 자율주행 시뮬레이션 SW 기업 ‘모라이(MORAI)’를 이끄는 정지원 대표입니다.
정 대표는 모라이가 핵심 기술로 내놓은 자율주행 시뮬레이션 SW를 소개하면서 "자율주행차가 실제 도로에서 맞닥뜨릴 수 있는 거의 모든 상황을 테스트해볼 수 있다"고 자신했어요. 무작정 실도로를 연습하는 것보다 안전하고 자율주행 검증 비용 절감, 위기 대응 기술 고도화까지 가능하다고 하네요. 어떤 기술인지 구체적으로 살펴볼까요?

Q. 모라이(MORAI)는 카이스트 출신 두 분이 설립한 자율주행 시뮬레이션 소프트웨어(SW) 기업으로 알고 있다. 두 설립자의 구체적 이력은.
본인(정지원 대표)은 자율주행 연구원 출신이다. 카이스트 동문 홍준 대표와 모라이를 설립했다. 현재 본인은 모라이 최고경영자(CEO)로 경영과 대외활동을 책임지고 있다.
동문인 홍준 대표는 현재 최고기술책임자(CTO)를 맡았다. 모라이 시뮬레이션 기술 개발 전반을 총괄하고 있다. 카이스트 연구원이었을 때는 원격 로봇 시스템 통합 관련 연구를 수행했다.
Q. 자율주행 시뮬레이션 기업을 설립한 배경은.
카이스트에서 자율주행 기술 연구를 위해 실제 도로에서 자율주행 테스트를 직접 수행했을 당시였다. 테스트 알고리즘 예외 상황을 인지하지 못해 주행 통제력을 잃고 테스트 차량이 가드레일을 받는 사고가 있었다.
이때 검증되지 않은 기술로 실도로 테스트하는 건 위험하다는 걸 알게 됐다. 동일한 가상 환경에서 자율주행 시스템을 검증할 수 있는 플랫폼이 필요하다는 걸 깨달았다. 이는 곧 모라이 창업 계기가 됐다.
Q. 모라이는 자율주행차 시뮬레이션 플랫폼 ‘모라이 심(MORAI SIM)’이 핵심 기술인 걸로 알고 있다.
그렇다. 정밀지도(HD map) 데이터 분석으로 도로와 차선 경계선 등을 포함하는 디지털트윈(Digital twin)을 빠르게 자동으로 구축하는 기술이다. 도로 실제 교통 상황을 시뮬레이션에 실시간으로 반영할 수도 있다.
자율주행차가 시뮬레이션 도로를 통해 실험하는 게 가능하다는 의미다. 이를 통해 다양한 상황에서 어떻게 대처해야 하는지에 대한 데이터가 입력돼 학습할 수 있다.
Q. 해당 기능을 좀 더 구체적으로 설명하자면.

자율주행차 인지·제어·판단 전 과정에 대한 테스트를 할 수 있다. 이를 통해 자율주행 검증차에 탑재된 AI 알고리즘이 개발 의도대로 작동하고 안전을 유지할 수 있는지 검증할 수 있다.
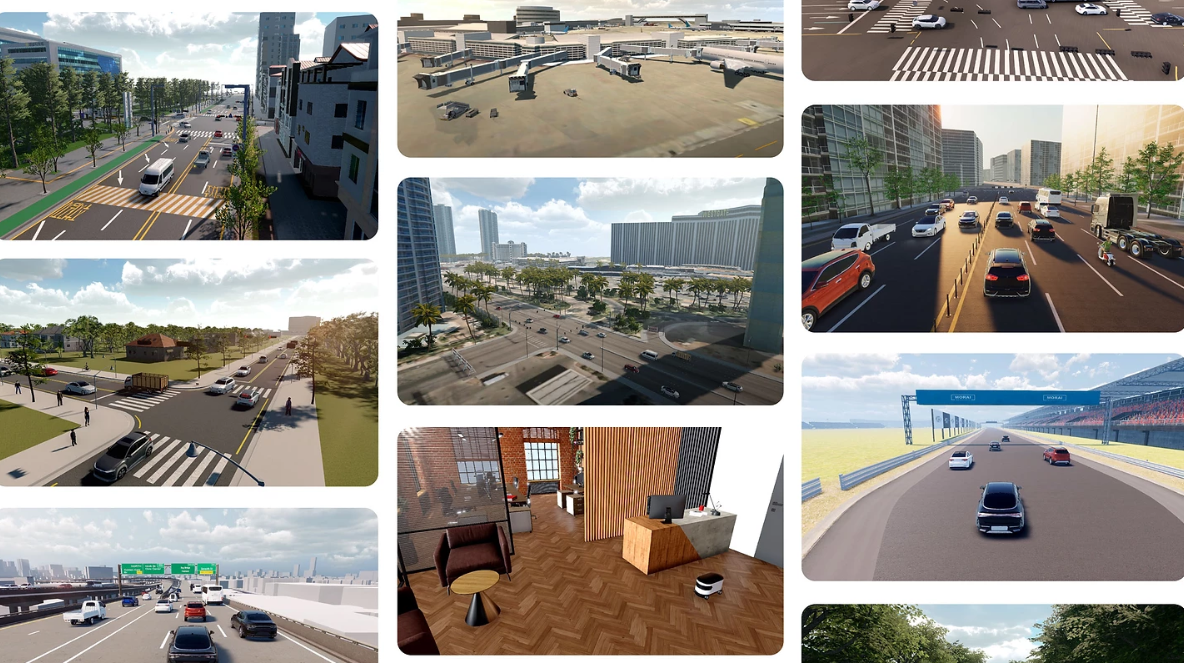
기능적으로는 고성능 3D 그래픽 엔진으로 현실 속 교통 상황, 날씨, 시간에 따른 조도 변화까지 사용자가 도로 환경을 사실적으로 설정할 수 있다. 이용자가 실험하고 싶은 가상 도로환경을 직접 만들 수 있다.
자율주행차가 실제 도로에서 맞닥뜨릴 수 있는 거의 모든 상황을 미리 경험할 수 있다. 무작정 실도로를 달리는 것보다 안전하다. 또 자율주행 검증 비용 절감과 위기 대응 기술 고도화까지 가능하다.
Q. 시뮬레이션에 들어가는 SW 모두 자체 개발했나.
기업 ‘언리얼’과 ‘유니티’ 등 게임 엔진을 베이스로 개발했다. 그 외에 차량동역학, 센서 모델, 환경 생성 모듈 등 자율주행 시뮬레이션에 필요한 핵심 모듈은 우리가 자체 개발했다.
Q. 현재 정밀지도 데이터 규모는.
국토지리정보원 데이터를 쓴다. 해당 기관에는 국내 30곳 이상의 약 2만km 데이터를 갖고 있다. 우리는 해당 데이터를 활용해 자율주행 시뮬레이션 환경을 자동 생성할 수 있다. 이를 통해 정밀지도가 구축된 어느 지역이든 시뮬레이션 환경을 만들 수 있다.
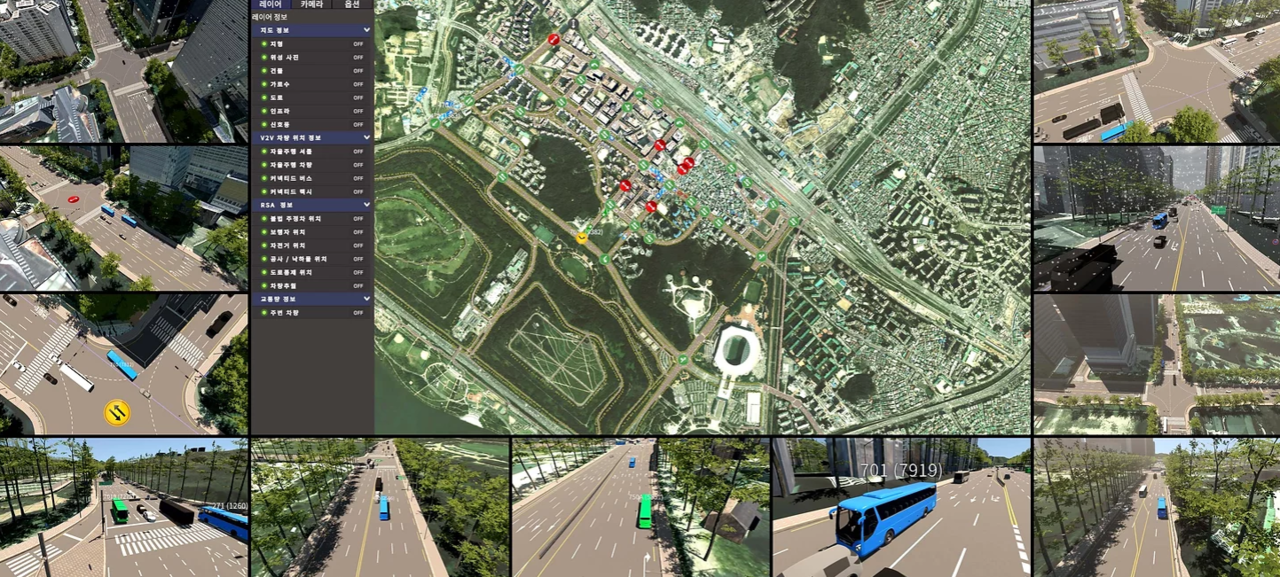
현재 자사 플랫폼 ‘MORAI SIM’에는 자동자안전연구원 주행시험로, 상암동, 판교, 대구 등 자율주행 실증이 활발히 진행되는 지역들이 모사돼 있다. 상암동 모빌리티 센서에서 수집되는 도로교통 데이터도 적극 활용했다. 여기에는 우리가 구축한 3차원 디지털트윈 관제 시스템이 구축돼 있다.
해외 지도 파트너사도 협력해 싱가포르, 미국 라스베이거스, 샌프란시스코, 시애틀 지역도 구축한 상태다.
Q. 시뮬레이션 환경 속 데이터 정밀도는.
정부기관과 기업에서 제공하는 정밀도로지도 데이터를 활용했다. 이를 통해 디지털 트윈 시뮬레이션 환경은 10cm 수준의 정밀도를 갖는다.
Q. 수집하기 힘든 악천후, 교통사고, 무단횡단 등 시나리오 데이터는 어떻게 모았나.
서울시, SKT와 상암동 모빌리티 센터에 '차세대 지능형 교통체계(C-ITS) 구축사업' 일환으로 관제 시스템을 만들어 시뮬레이션 환경을 구축한 상태다. 해당 시스템에는 무단횡단자, 불법 주정차, 신호, 교통류, 포트홀 상황을 실시간으로 관제하고 데이터베이스를 만들 수 있다.
특히 우리는 자율주행이 가능한 구간을 일컫는 'ODD(Operational Design Domain)'에 시나리오 데이터베이스를 꾸준히 쌓았다. 이를 분석해 시뮬레이션 플랫폼 고도화에 활용할 수 있다.
Q. 일각에선 기술을 뒷받침할 만한 국내 데이터법이 유연하지 못하다는 지적이 있다. 자율주행 데이터 수집에 걸림돌이 아직 있다는 게 주요 이유다. 업계 대표로서 어떻게 생각하는지.

자율주행 시뮬레이션 신뢰성과 정확도 향상을 위해서는 실도로 상황에 대한 빅데이터 구축이 활발히 이뤄졌으면 한다. 최근 정부가 주도적으로 데이터를 공유하는 사례가 전보다 늘긴 했다.
최근 경기도 자율주행 센터에서 자율주행 관련 데이터 180만 건을 공개했다. 또 자동차안전연구원은 수년 동안 자율주행 데이터 공유 협의체를 운영하며 자율차 기업과 공공기관이 수집한 데이터를 공유했다.
Q. 현재 진행 중인 새로운 기술이나 향후 목표가 있다면.

향후 자율주행 시스템 개발 지침이 될 'ISO21448(SOTIF, Safety Of The Intended Functionality)' 대응이 가능한 시뮬레이션 플랫폼도 구축할 계획이다.
이를 위해 최근 자사 플랫폼에 'SaaS' 방식을 도입하기 시작했다. 클라우드를 활용해 플랫폼 하나로 PC 수 천대를 동시에 시뮬레이션 하는 것과 같은 효과를 내는 게 특징이다.

이번 <AI타임스> 인터뷰에 참여한 정지원 대표는 카이스트(KAIST) 항공우주공학 석사 학위를 취득하고 박사 학위를 수료했다. 국내외 자율주행 경진대회에 다수 참가해 입상했다.
- 2019 자율주행 스타트업 투자연계 오디션 장려상
- 2019 KAIST 창업어워드 최우수상
- 자율주행을 위한 정밀도로지도 활용성 검증 공모전 2위
- 서울대 공대·현대자율차 스타트업 지원 프로그램 '에노탱크 시즌2' 피칭 발표 2위
- 2021 벤처창업진흥 유공 포상 청년기업부문 국무총리 표창
AI타임스 김미정 기자 kimj7521@aitimes.com
