

광주과학기술원(지스트·GIST) 융합기술학제학부 윤정원 교수 연구팀(뇌 나노로봇 연구센터)이 사용자가 2차원으로 고속·고가감속 보행할 수 있는 초박형 '360도 트레드밀(Omni-directional treadmill)'을 제안해 실험실 창업 페스티벌(LAB START UP 2022)에서 전시 부문 최우수상을 수상했다. 통상적으로 러닝 머신이라 불리는 일반적인 트레드밀은 1차원(단방향)으로만 보행 운동을 지원한다. 반면 360도 트레드밀은 사용자가 원하는 방향으로 자유롭게 보행할 수 있다는 게 강점이다.
윤정원 교수 지도 아래 융합기술학제학부 표상훈(팀 대표)·이호수·김호영씨와 엠아이 유한책임회사의 문태예씨가 '인바이트 팀'을 구성해 이번 대회에 참여했다. 올해 실험실 창업 페스티벌에는 공공기술 기반 시장 연계 창업 탐색 지원사업에 참가한 전국 주요 대학에서 선출된 116개 팀이 참여했다. 이 가운데 인바이트 팀이 제시한 360도 트레드밀의 기술적 우수 성과는 시장에 미칠 큰 파급효과를 인정받았다는 게 지스트 측의 설명이다.

공공기술 기반 시장 연계 창업 탐색 지원사업은 상업성 및 사업성이 있는 실험실의 연구 결과물을 창업에 연계할 수 있도록 지원하는 내용을 주요 골자로 한다. 해당 사업은 과학기술정보통신부가 주최하고 한국연구재단과 한국청년기업가정신재단이 주관했다.
윤정원 교수 연구팀의 360도 트레드밀은 미육군연구소(ARL)가 2000년대 초 최초로 개발해 2010년 초반 상용화된 차세대 보행 인터페이스 장치다. 보행 의도(속도·방향)를 실시간으로 파악해 사용자의 위치를 기준 위치에 계속 유지할 수 있도록 함으로써 메타버스에서 구현된 공간을 물리적으로 인터페이스할 수 있는 장치다.
인바이트 팀은 새로운 기어 전동 방식(연속 배치 스크류 기어)을 통해 2차원 모션을 초박형 공간에서 실현할 수 있는 동력 전달 메커니즘을 개발했다. 현재 개발된 360도 트레드밀이 가지고 있는 과도한 두께와 소음 문제를 전반적으로 해결할 수 있도록 연속으로 배치된 특수한 스크류 기어를 2단으로 적층해 고속·고가감속의 2차원 무한지면 구현에 성공했다.
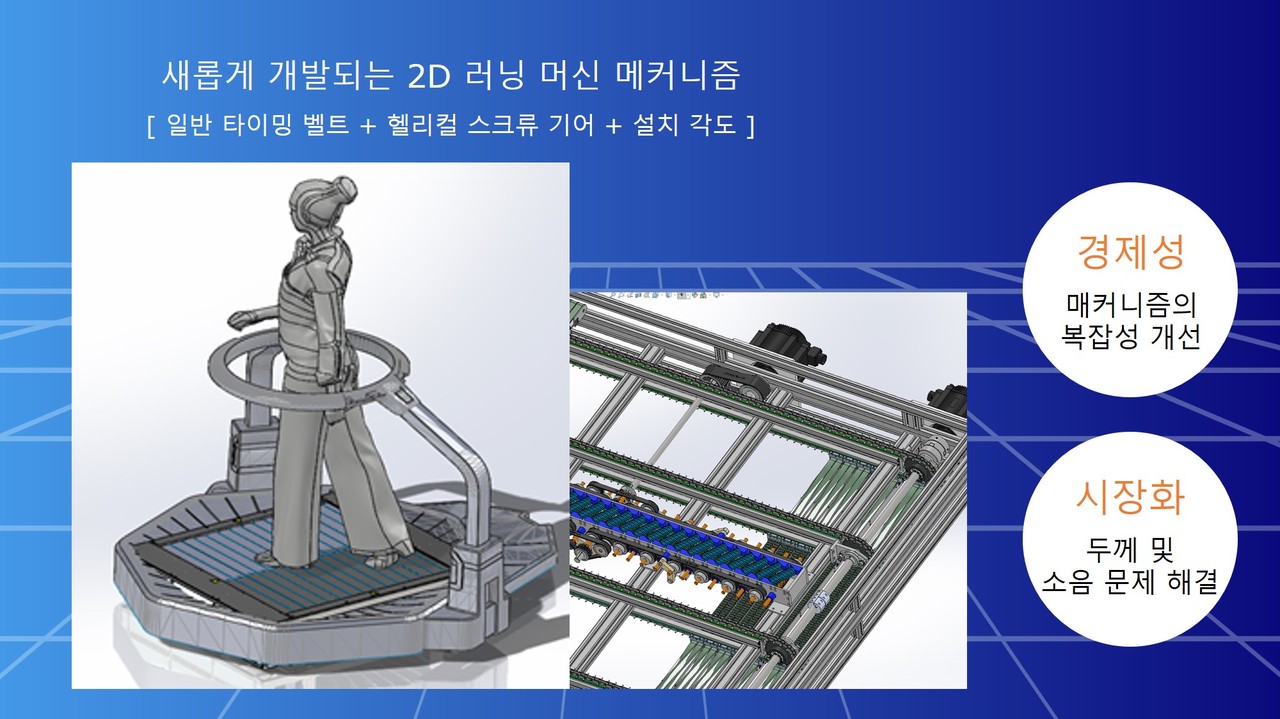
인바이트 팀은 모션 성능(3.5m/s, 3.5m/s2)을 확보하면서 가정에서도 쉽게 설치가 가능하도록 설계했다. 25cm 정도의 두께에서도 기존 개발된 360도 트레드밀의 문제점을 해결할 수 있는 새로운 전동 메커니즘을 제시한 것. 아울러 안정적인 보행 인터페이스가 가능한 발목 관절 토크 예측 기반의 보행 인터페이스용 제어 알고리즘을 개발했다.
윤정원 교수는 "현재 메타버스의 세계에서 실제 보행을 할 수 있는 장치에 대한 수요가 증가하고 있는 가운데 가정, 병원, 연구소 등 다양한 곳에서 보행 인터페이스 서비스를 제공할 수 있을 것"이라며 "향후 2차원 보행 운동을 안전한 곳에서 실감나게 할 수 있도록 보행 운동 방식의 대대적인 변화가 기대된다"고 말했다.
AI타임스 윤영주 기자 yyj0511@aitimes.com
[관련기사] 군사용부터 재활·산업용까지…진화하는 ‘입는 로봇’
