구글이 인터넷 없이도 로봇에 내장해 복잡한 작업을 수행할 수 있는 경량형 온디바이스 인공지능(AI) 모델을 공개했다.
구글 딥마인드는 24일(현지시간) 인터넷 연결 없이 로봇에 직접 탑재해 사용할 수 있는 새로운 비전-언어-행동(VLA) 기반 AI 모델 ‘제미나이 로보틱스 온디바이스(Gemini Robotics On-Device)’를 출시했다.
로봇이 로컬에서 직접 연산을 수행하며 다양한 작업을 실행할 수 있도록 설계된 것이 특징이다.
지난 3월 발표된 VLA 모델 ‘제미나이 로보틱스’를 기반으로 개발됐다. 이는 양팔 로봇의 움직임을 정밀하게 제어할 수 있는 로보틱스 특화 기초 모델(foundation model)이다.
구글은 새로운 모델이 작은 연산 자원만으로도 고성능을 발휘하며, 복잡한 작업에 대한 일반화 능력과 민첩한 조작 능력을 동시에 갖췄다고 밝혔다.
데모 영상에서는 가방 지퍼를 여는 작업, 옷을 개는 작업, 산업용 벨트 위에서의 조립 작업 등 다양한 시연이 이뤄졌다. 또 훈련에 포함되지 않은 새로운 상황과 사물에도 높은 일반화 성능을 보였다는 설명이다.
로컬 디바이스에서 작동하도록 최적화했으며, 인터넷 접속이 어려운 환경에서도 낮은 지연(latency)으로 작업을 수행할 수 있다. 자연어 지시를 따라 작동하며, 가방의 지퍼 열기나 옷 개기처럼 정밀한 다단계 조작이 필요한 작업도 수행할 수 있다.
특히, 구글이 처음으로 사용자 미세조정을 허용한 VLA 모델이다. 즉, 대부분 작업은 기본 모델 상태로 바로 수행할 수 있지만, 특정 작업 환경에 맞춰 성능을 높이고 싶으면 50~100개의 시연 영상으로 빠르게 학습할 수 있다. 이를 통해 모델이 보유한 기초 지식이 새로운 작업에 잘 전이된다고 강조했다.
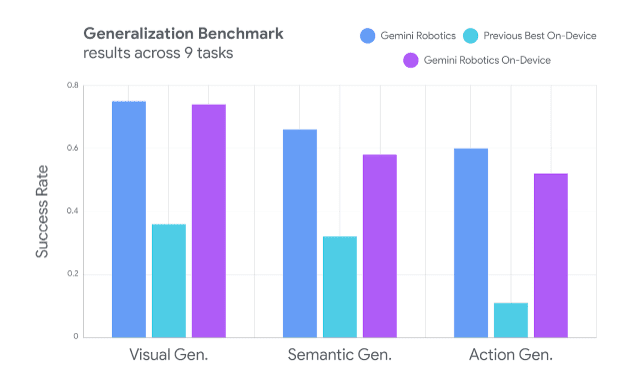
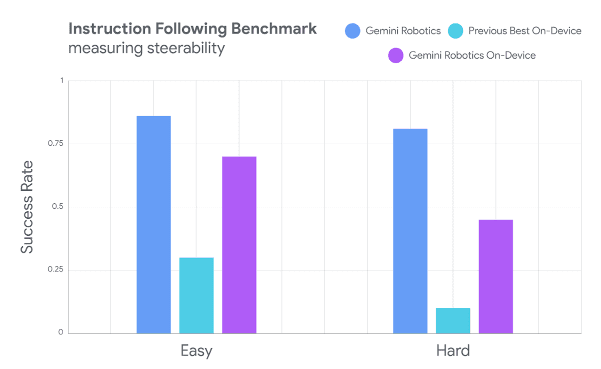
벤치마크에서 이 모델은 기존 클라우드 기반 제미나이 로보틱스 모델과 비슷한 성능을 기록했으며, 다른 온디바이스 모델들과 비교해도 전반적으로 우수하다고 주장했다. 특히, 훈련 데이터 분포를 벗어난 작업이나 복잡한 단계별 명령에서도 차별적인 성능을 발휘했다고 전했다.
제미나이 로보틱스 온디바이스는 원래 '알로하(ALOHA)' 양팔 로봇을 위해 개발됐지만, '프랭카(Franka)' FR3 양팔 로봇과 앱트로닉의 휴머노이드 로봇 '아폴로(Apollo)' 등 다양한 플랫폼에도 성공적으로 적용됐다.
개발자들이 모델을 쉽게 적용할 수 있도록 전용 SDK도 공개했다. 이 SDK를 활용하면 '무조코(MuJoCo)' 물리 시뮬레이터에서 모델을 실험하고, 특정 환경에 맞게 빠르게 미세조정하는 것이 가능하다.
구글은 "이 모델은 강력한 로봇 모델을 보다 쉽게 접근하고 적응할 수 있도록 하는 진전을 의미하며, 온디바이스 솔루션은 로봇 커뮤니티가 중요한 지연 및 연결 문제를 해결하는 데 도움이 될 것"이라고 밝혔다.
박찬 기자 cpark@aitimes.com
