
스스로 모델을 만들어 어떤 목표를 달성하고 움직이는 방법을 계획할 수 있는 등 자각 능력을 갖춘 로봇 팔을 개발했다는 주장이 나왔다.
영국 과학기술 매체 뉴사이언티스트는 14일 학술지 사이언스 로보틱스에 이와 같은 연구 결과가 발표됐다고 보도했다.
모든 로봇은 시뮬레이션을 통해 어떤 방식으로 작업을 수행하도록 학습된다. 로봇은 무엇을 해야 하는지 관찰하면서 작업을 모방할 수 있다. 로봇은 작업을 하면서 왜 하는지를 이해하거나 물리적 공간 내의 위치를 정확히 파악하기보다는 아무 생각 없이 이행하게 된다.
때문에 예를 들어 팔을 장애물에 부딪치는 등의 실수를 자주 한다. 반면 사람은 실수하지 않기 위해 변화에 대응한다. 미국 노스캐롤라이나주 듀크 대학의 보이안 첸은 “우리가 평소에 당연한 것으로 여기는 인간의 매우 필수적인 능력”이라고 설명했다.
미국 뉴욕 컬럼비아 대학교의 연구논문 공동 저자 호드 립슨은 “자동차나 진공청소기를 조립하도록 프로그래밍하는 것이 아니라 기계가 자신에 대해 이해하도록 하기 위해 오랫동안 노력해 왔다”고 밝혔다.
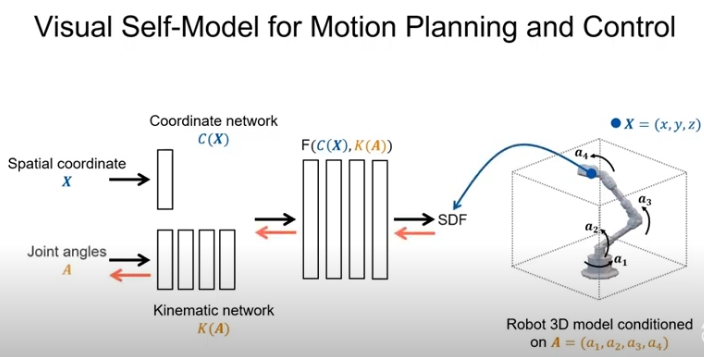
립슨, 첸과 동료들은 로봇 팔을 바닥에 있는 4대의 카메라와 위에 놓인 1대의 카메라로 둘러싸인 실험실에 넣어 이와 같은 목표를 시도했다. 카메라는 공간 내 움직임을 모니터링하는 로봇에 연결된 인공지능(AI)의 한 형태인 심층 신경망에 영상을 다시 전달했다.
3시간 동안 로봇은 임의로 꿈틀거리면서 신경망에 팔의 기계적 동작에 대한 정보를 전달했고, 공간 내에서 로봇이 어디로 이동하는지 보면서 어떻게 반응하는지 관찰했다. 이를 통해 7888개의 데이터 포인트가 생성되었고, 팀은 가상 버전의 환경에서 로봇 시뮬레이션을 통해 1만개의 데이터 포인트를 추가로 생성했다.
인공지능이 로봇 팔의 공간 내 위치를 예측하는 것을 잘 학습했는지 테스트하기 위해, 이 로봇은 움직일 때 팔이 ‘발견될 것’으로 여기는 구름과 같은 그래픽을 생성했다. 이 측정치는 1% 이내로 정확했다. 작업 공간 너비가 1미터일 경우 시스템이 위치를 1cm 이내로 정확하게 판단한다는 의미다.
신경망을 로봇의 일부로 간주하면 이는 주어진 시점에 물리적으로 위치를 확인할 수 있다는 것을 의미한다. 립슨은 “로봇이 자체의 정신 모델을 만들어낼 수 있었던 것은 로봇 역사상 처음”이라며 “작은 걸음이지만 앞으로 일어날 일들의 징조를 보여주는 것”이라고 밝혔다.
연구 논문에서 동작 계획과 관련해 연구진들은 로봇 시스템을 ‘3D 자각’ 능력을 갖고 있다고 표현했다. 립슨은 사람과 같은 일반적인 자각 능력을 가진 로봇은 20~30년 정도 후에나 나올 것으로 예상하고 있다. 첸은 과학자들이 자각 능력을 완전히 실현하려면 오랜 시간이 걸릴 것이라며 “이 로봇이 완전히 자각을 하고 있다고 말할 수는 없다”고 설명했다.
다른 전문가들은 3D 자각 능력에 대한 논문의 주장에 대해 조심스럽고 회의적이다. 조지아텍의 앤드류 헌트 “이러한 방법을 기반으로 유용한 애플리케이션을 개발할 수 있는 추가적인 연구는 가능성이 있지만, 자각 능력에 대해서는 그렇다고 할 수 없다”라며 “컴퓨터는 단순히 움직이는 로봇 팔의 모양과 동작 패턴을 일치시킨다”고 지적했다.
영국 셰필드 대학의 데이비드 카메론은 “목표를 달성하기 위해 지정진 경로를 따라가는 것은 자각 없는 로봇에 의해서도 쉽게 이뤄진다”며 “목표를 향해 궤도를 모델링하는 로봇은 자각 능력과 유사한 것을 만드는 중요한 첫 단계”라고 설명했다. 그는 “동작과 일치하도록 스스로 지속적으로 모델링하는 로봇이 자각 능력을 가진 로봇을 향한 큰 발걸음이 될 것”이라고 밝혔다.
AI타임스 이한선 객원 기자 griffin12@gmail.com
