
올빼미나 박쥐처럼 나무에 매달려 있는 드론이 개발됐다. 정상적인 착륙이 어려운 지역에서 유용하게 사용할 수 있다는 설명이다.
스위스 연방 공과대학(EPFL) 지능형 시스템 연구실은 지난주 네이처 저널을 통해 나무나 기둥을 날개로 껴안아 추락을 방지할 수 있는 무인항공기(UAV), 즉 드론을 만들었다고 발표했다.
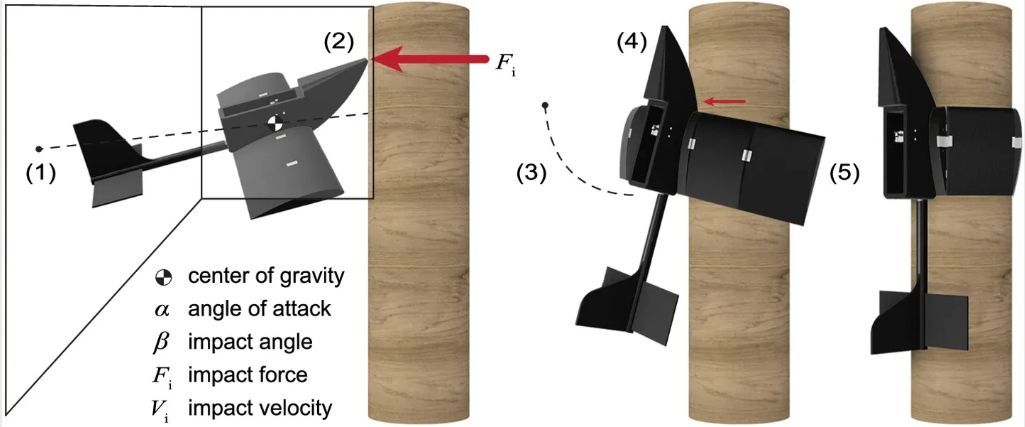
'퍼치허그(PrecHug)'라는 이름의 이 드론은 비행 중 나무에 가볍게 부딪힌 뒤 날개로 감싸 미끄러짐을 방지한다. 이때 드론의 코(Nose)가 윗쪽으로 방향을 바꾸며 기체는 수직 구조로 바꾸며, 충돌 시 충격으로 텐션 와이어가 풀려 날개의 장치가 기둥을 움켜쥐게 되는 방식이다.
날개를 비행뿐만 아니라 나무에 매달리고 기어오르는 데 사용하는 올빼미와 박쥐에서 영감을 얻었다는 설명이다.
드론은 무게가 550g에 불과하다. 연구진은 충격 속도와 각도, 기둥 재료, 크기 등 다양한 측면을 고려, 초속 3~5m의 비행 중 15도 이상의 충격 각도로 방향을 바꾸고 날개 길이의 28%보다 큰 다양한 유형의 기둥을 잡을 수 있다고 설명했다. 성공적으로 나무에 매달린 경우는 73%라고 밝혔다.
연구진은 퍼칭(나무를 발톱으로 움켜쥐는 행위) 메커니즘에서 코의 디자인과 정확한 타이밍이 중요하다고 설명했다. 또 나무가 클수록 성공률이 낮아지며, 마찰의 중요성도 강조했다. 아직은 제한이 많다는 말이다.
또 이번 실험은 정식적으로 동력 장비를 갖춘 드론을 사용한 것이 아니라, 수동으로 드론을 날려 퍼칭 실험에만 집중했다. 향후 정식으로 개발되고 센서 등을 장착하려면 성공률이 더 높아져야 한다는 지적이다.
하지만 연구진은 이런 드론을 사용하면 고층 빌딩 건설 현장 등에서 인간의 개입 없이 드론이 비계 등 구조물에 매달려 검사 작업일 실시할 수 있을 것으로 기대하고 있다. 또 자연환경에서 생물 다양성 보존과 같은 응용 분야에 사용할 가능성을 열어 준다고 밝혔다.
"우리의 연구가 퍼칭 기술을 발전시키는 토대를 마련하고, 다양한 응용 분야에 맞춰진 매우 다재다능한 로봇 시스템 개발의 길을 열 것이라고 굳게 믿는다"라고 논문을 통해 전했다.
임대준 기자 ydj@aitimes.com
